Mapping the Lake Bed
FishMap Robotics creates digital twins of water bodies.
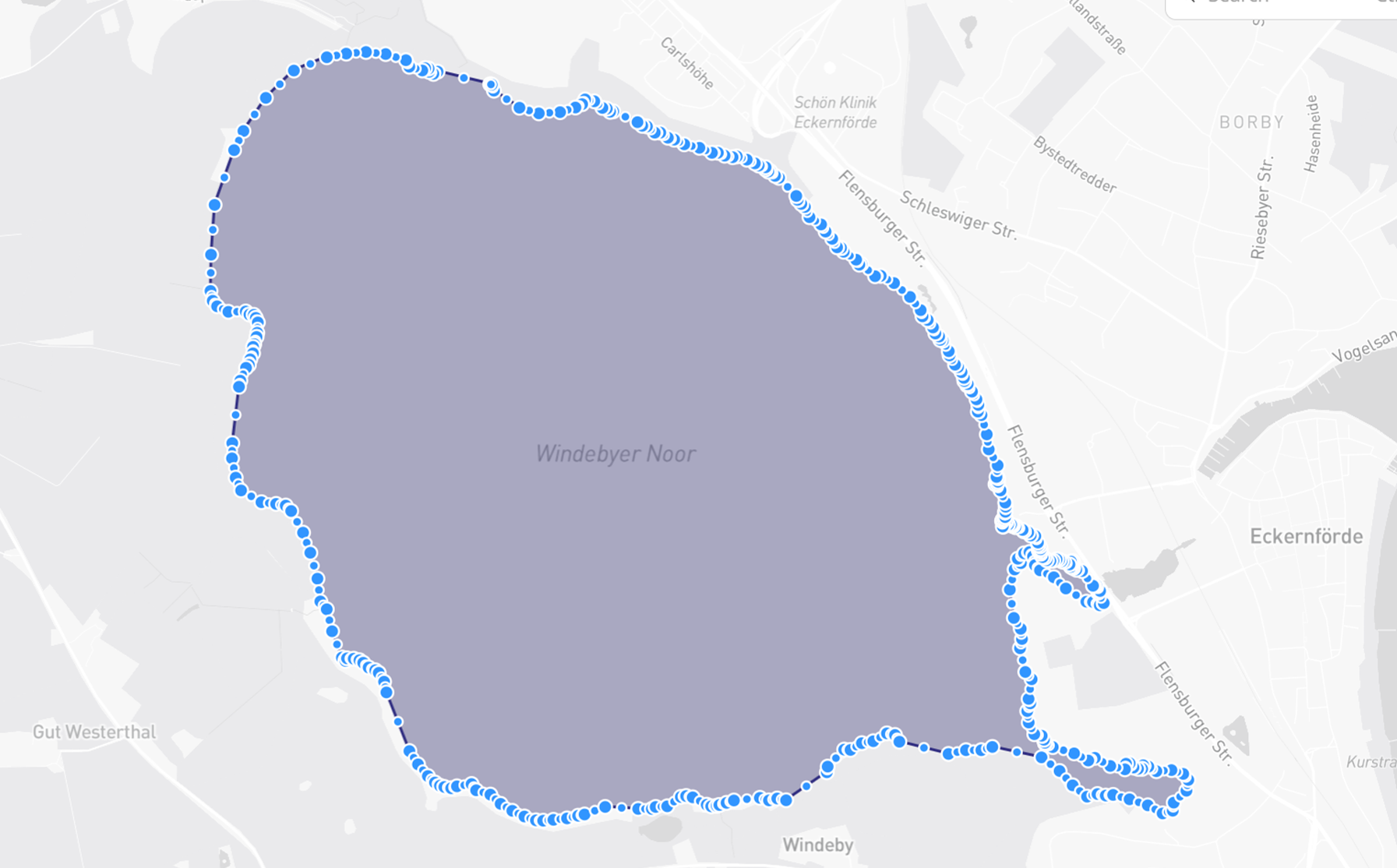
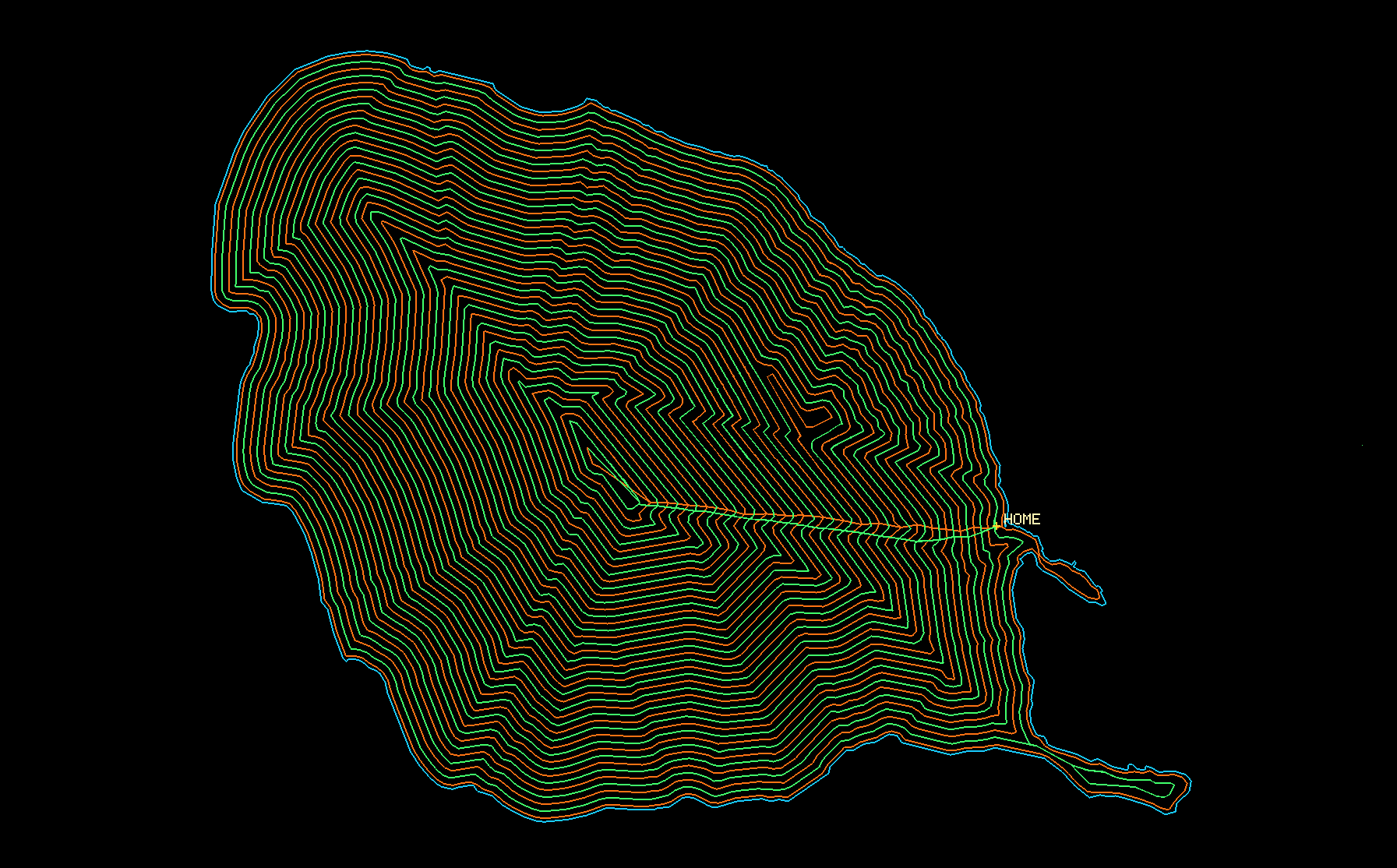
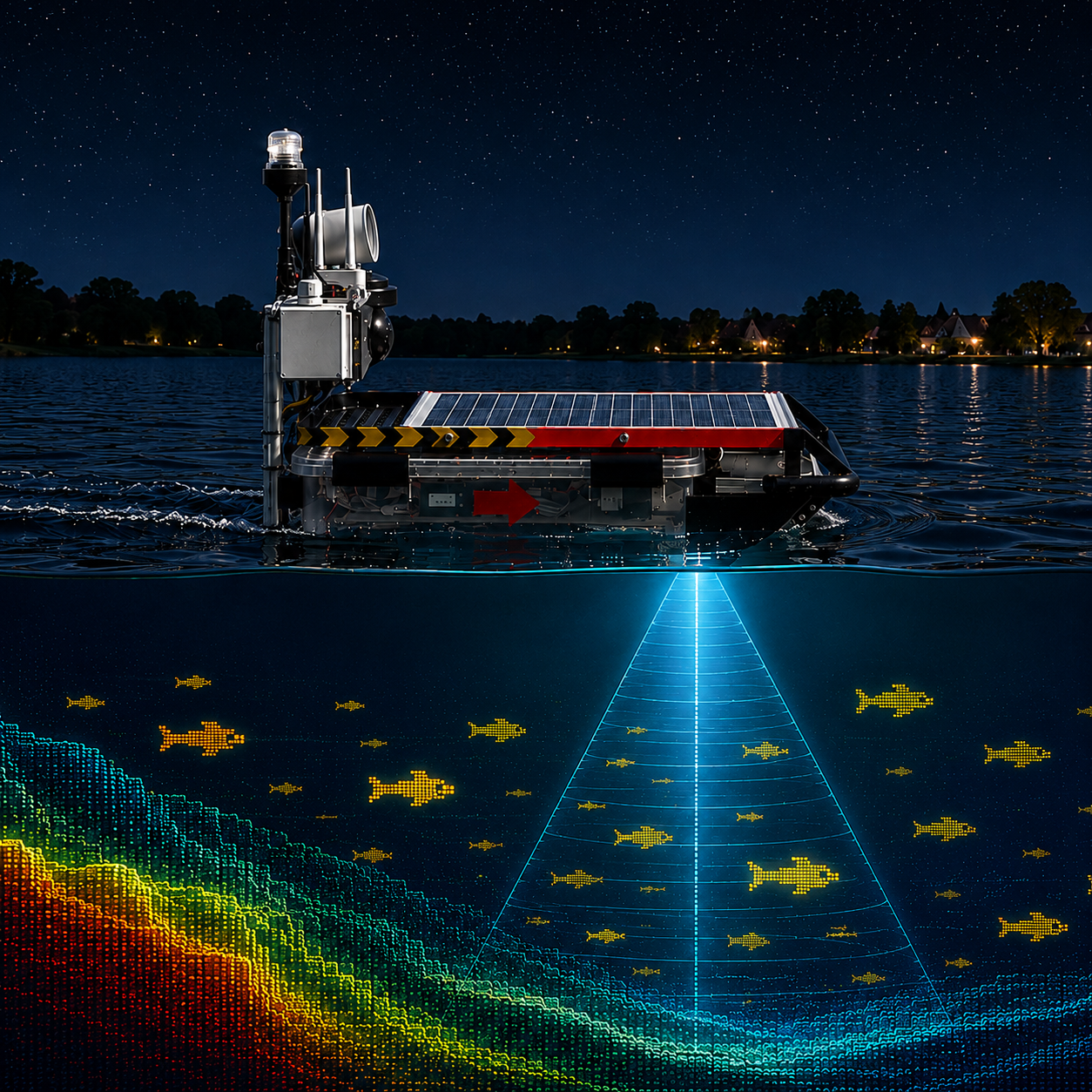
The project develops autonomous drone boats that map lakes, coastal waters and other defined water areas, detect fish activity and monitor the water surface. Once a search area is defined, the drone calculates its own route, covers the area autonomously and continuously streams data from sonar, cameras and onboard sensors to the ground station.
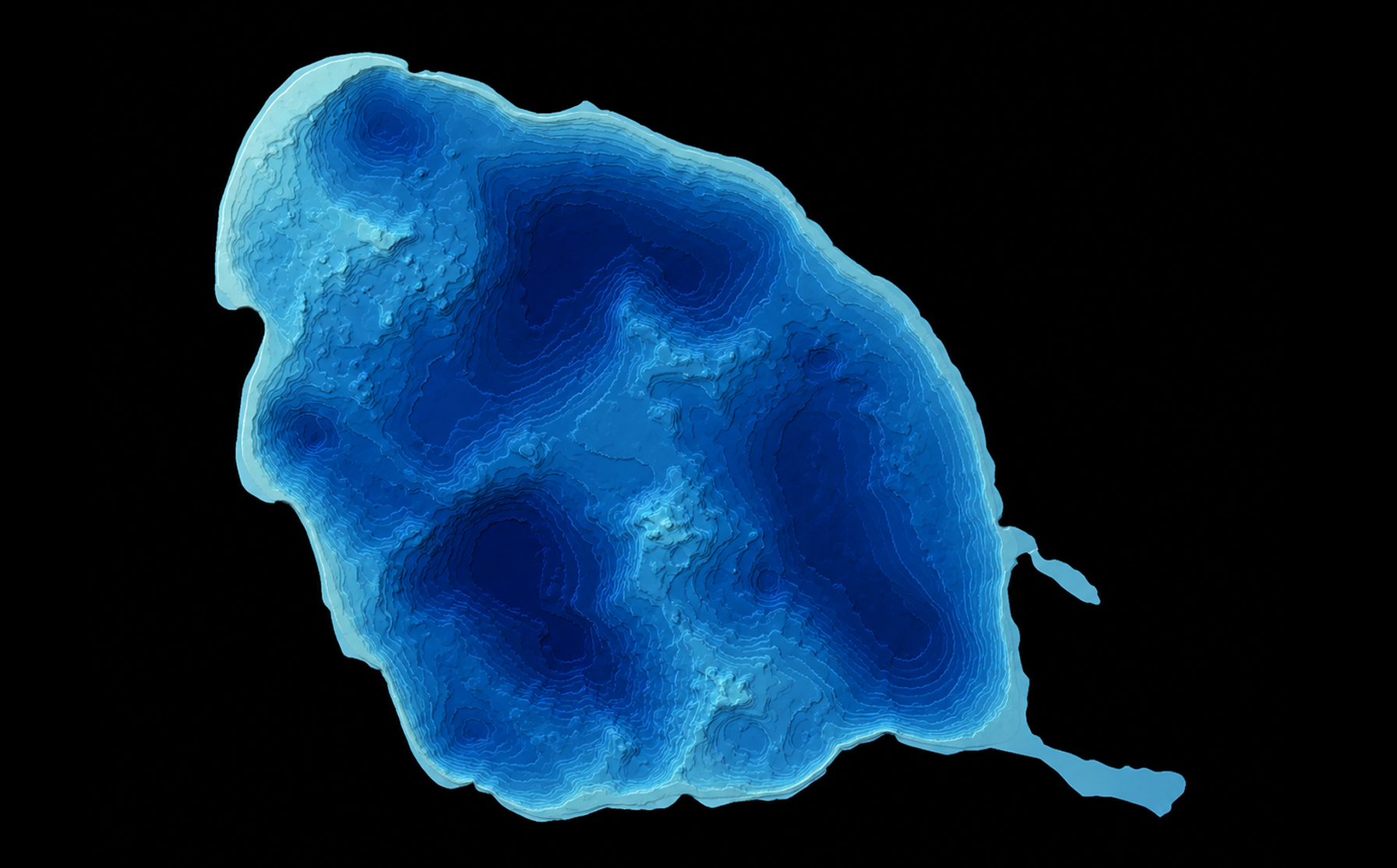
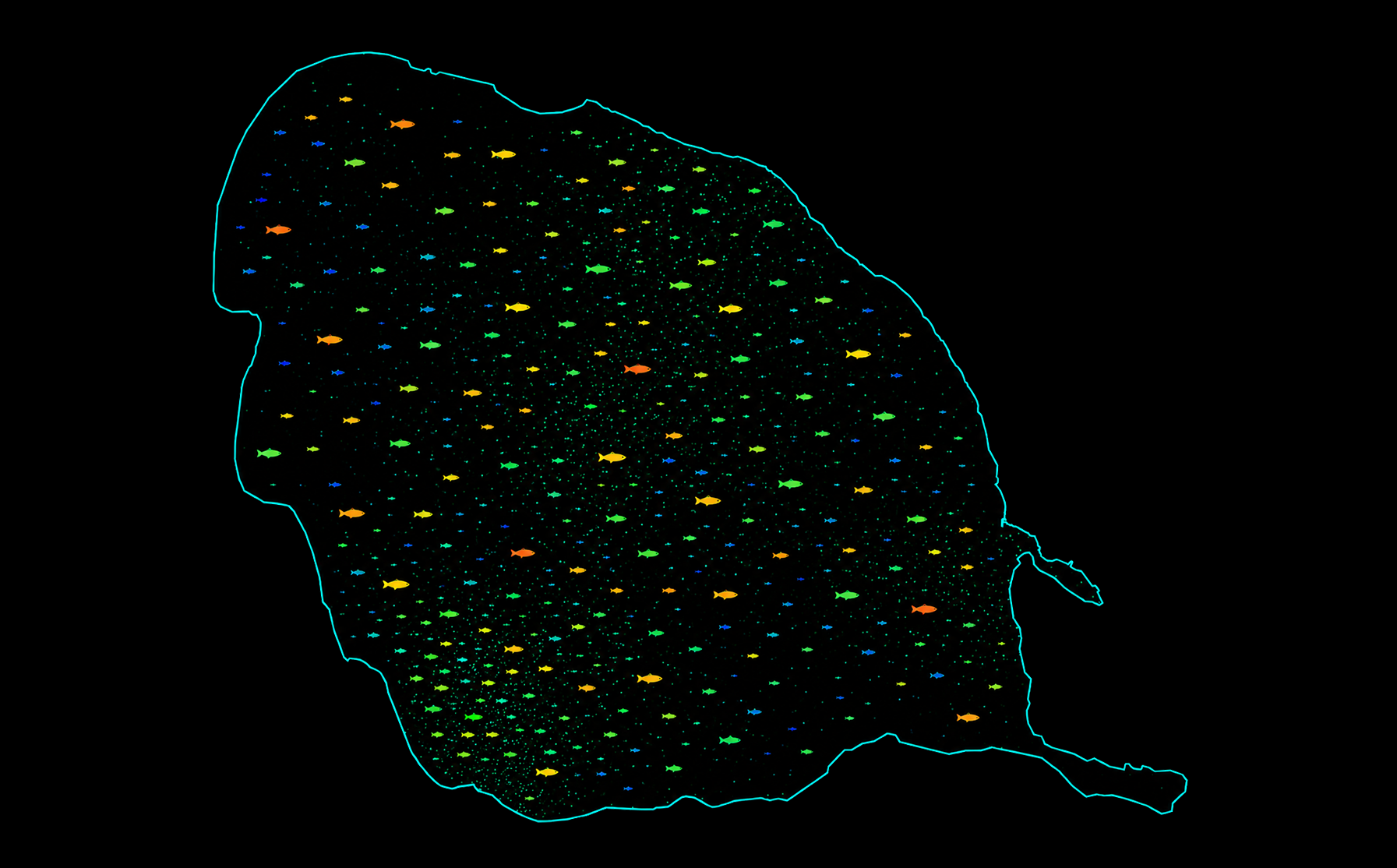
There, the collected data is transformed into a digital twin of the water body. Depth profiles, fish detections, surface activity and environmental data become visible in one shared interface. Instead of working only with experience, assumptions and isolated observations, fisheries gain a dynamic, map-based view of their operating area.
This gives fishery work a new simulation-like dimension: areas can be inspected, compared and revisited digitally, almost like in a strategy or management game – but based on real sensor data from the water.
The system supports fisheries and research institutions in making better decisions, monitoring sensitive areas and protecting fish stocks, for example through surveillance and acoustic deterrence of cormorants.